


由于蜜蜂、飞蛾、蝴蝶等野生自然授粉媒介的数量和多样性不断下滑,这一现象已引起人们对粮食安全的广泛忧虑。为解决这一迫在眉睫的问题,人们迫切探索能够替代自然授粉的新方法,以保障日益增长的农业需求。
与自然授粉媒介相比,授粉机器人可经过设计适应各类环境和任务,不仅能在户外环境下运作,还能适应温室等室内农业环境,执行诸如疏花和收集作物数据等额外任务。其引入将极大减轻农民对自然授粉媒介的依赖,并带来多重潜在益处。
为实现机器人授粉,过去曾有研究人员尝试采用分散或喷雾花粉的方法,但这些方式精度不高,难以针对特定花卉类型进行授粉。为了突破这一限制,精准授粉技术应运而生,并在多种农业作物中证明了其效用。
此前,曾有研究人员对小型昆虫飞行机器人在授粉中的应用潜力进行了探索,但结果表明这些设备通常缺乏地面系统的效率、可维护性、易控制性以及高精度传感。来自美国西弗吉尼亚大学机械与航空航天工程系的研究人员此前曾研发了一款名为BrambleBee的单臂接触式精准授粉机器人,实现了在温室环境中自动识别并为荆棘花(如黑莓和覆盆子花)授粉。但该系统仅限于单个操作器,限制了为荆棘花簇授粉的生产力和可扩展性。

为了填补此前精准授粉机器人与机器人群之间的空白,该团队在已推出的授粉机器人BrambleBee的基础上进行了创新升级。通过综合各类授粉机器人的精髓,他们于近日推出了全新的六臂授粉机器人——Stickbug,为农业授粉领域带来新可能。
Stickbug,这款专为温室中荆棘花授粉而研发的六臂授粉机器人,通过整合多个机械臂于一个驱动底座之上,显著提升了花卉授粉的效率。为解决复杂状态空间中的运动规划挑战,研究团队巧妙地设计了每个机械臂和驱动底座的独立运行模式,它们类似于群体行为,但又受到一个核心“裁判”的统筹,以确保在无需持续中央控制的情况下,所有部件都能流畅、和谐地工作。

在设计Stickbug时,团队全面考量了荆棘花的生长分布、动态变化、娇嫩特性以及授粉精确度,同时还针对GPS信号不稳定的温室环境下,机器人在高效、精细授粉作业中可能遭遇的精确定位与导航问题进行了深入探究。
Stickbug的设计采用了轮式地面机器人的构造,由三大核心子系统构成:驱动底座、机械手以及授粉末端执行器。特别值得一提的是,它配备了六个机械手臂,而每个手臂的末端都装有授粉末端执行器。为了提升机器人的感知与操作能力,研究团队还为其加装了多种传感器,包括3D激光雷达、惯性测量单元(IMU)、执行器编码器,以及在每个机械臂末端执行器上都连接了深度相机。这样的配置让Stickbug在执行授粉任务时,能够展现出极高的精准度和环境适应性。
在温室狭窄通道中行驶,对机器人的移动性提出了极大的挑战。为解决这一问题,研究团队选用了Kiwi驱动器底座,其全方位的移动能力和紧凑设计使其非常适合在荆棘植物行间进行连续授粉,完美适应温室环境的空间限制和操作需求。
为提高导航和绘图能力,研究团队还为驱动底座配备了ZED2i惯性测量单元、3D Velodyne LiDAR和Realsense D455摄像头,以增强对障碍物的感知,改善激光雷达遮挡区域的视野。所有数据均由配备Nvidia GPU的英特尔NUC处理,以确保快速计算。此外,研究团队选用了23cm的全向轮,使机器人的行驶速度达到1米/秒,并配备了由三块12v 42Ahr的LiFe电池组成的电源系统和板载WiFi路由器,以便与机械手通信。
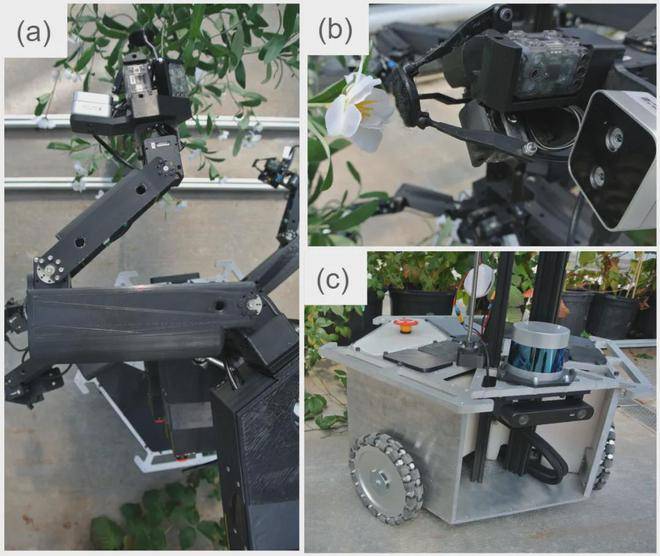
为提高授粉效率,研究人员为Stickbug配置了六个机械手,并进行了复杂设计以确保机械手能够协同工作。由于植物排列紧密且荆棘植物高大,限制了大型机械臂的操作空间,因此Stickbug采用共享垂直桅杆设计来装备六个小型机械手。
由于共用桅杆,可能会发生碰撞,因此需要固定分段的手臂工作空间,但花朵的不均匀分布同时又要求机械手协同工作以实现有效授粉。对此,研究团队精心规划了机械手的布局,通过采用左右导轨设计,让每个导轨支撑三个平面机械手。这种设计在避免碰撞的同时实现了跨轨道的协作。
为了提升授粉精确度,机械手的末端执行器必须与花朵对齐。对此,研究人员采用了球形腕部设计确保机械手与花朵对齐,并鉴于花朵的径向对称性省略了滚动接头。通过结合垂直桅杆、双轨系统、小型平面臂和球形手腕,Stickbug非常适合在复杂的温室环境中为荆棘植物进行授粉。
为了促进花朵的识别和追踪,研究人员还在操纵器的末端执行器上配备了Realsense D405深度相机。然后,由板载的Nvidia Jetson处理图像,并指导机械手自主操作。为了充分接触花朵,Stickbug的桅杆跨度设计为0.3-1.9米,这使其可创建一个240度的扇形圆柱形工作空间,左右导轨之间重叠120度。为了最大限度地减少动态质量,从而降低电力需求并提高安全性,平面臂和手腕采用了轻质3D打印连杆制造,并由Dynamixel伺服系统提供动力,以实现精确控制和集成布线。
此外,为了降低电力需求并提高安全性,研究人员通过优化动态质量来实现。整个系统的电力通过底座的菊花链向机械手提供,进一步简化了设备结构。通过这些创新设计,Stickbug能够在复杂的温室环境中为荆棘植物高效授粉,展现出了卓越的适应性和实用性。
在授粉末端效应器的制作上,研究团队巧妙地运用了一个3 DoF半Stewart平台的末端执行器,以应对复杂的花卉授粉任务,该执行器采用定制的3D打印设计,并特别配备了毛毡表面,能实现精准的俯仰、偏航以及前进动作,可轻柔而细致地接触花朵以进行授粉。
其动力来源于三个Dynamixel XL320伺服系统,这些伺服系统通过内联的DC-DC电压调节器,将手臂的12V电源稳定调节至9V供电,确保了稳定的性能输出。此外,执行器上还集成了彩色LED,用于直观展示其自主状态。这样的设计不仅确保了Stickbug在与花朵交互时的柔和性,同时也方便了与执行器的无缝集成。
在动态温室环境中,协调多个机械手和移动驱动底座面临巨大的计算挑战,尤其是在处理一个包含51自由度的复杂系统时。为了克服这一难题,Stickbug的软件架构采用了分布式方法,将计算和任务分散到六个操纵器和驱动器底座上,从而降低系统的计算负载,避免出现多个操纵器争夺同一朵花等潜在冲突。这种架构通过引入仲裁代理来维持必要的集中监督,同时保持计算负载的可管理性。
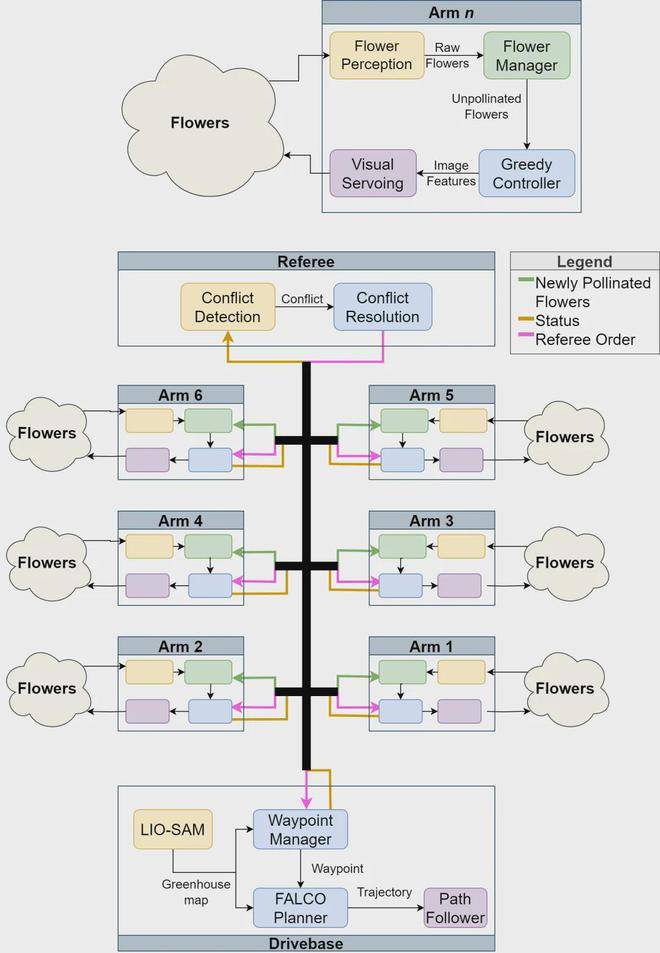
驱动底座的主要任务是在GPS信号不可靠的温室内进行精确测绘和定位,并确保机械手能够接触到每一朵未授粉的花朵。为了实现这一目标,研究团队采用了基于Lidar-IMU的同步定位和建图(SLAM)算法——LIO-SAM。该算法克服了GPS在温室内定位和建图的局限性。
为了在温室内安全导航,研究团队利用路径点管理器和FALCO路径规划器生成一条避开障碍物的路径。路径跟随器则利用Kiwi驱动器的功能,在三种驱动模式之间灵活切换,确保机器人在狭窄的温室过道中安全地遵循计划轨迹。

每个机械臂代理都负责在与其他操纵器协调的同时,识别花朵并为其授粉。这包括在茂密的树叶中检测和定位单个花朵,确定它们的方向以进行充分授粉,以及在动态移动的机械手中规划授粉任务。
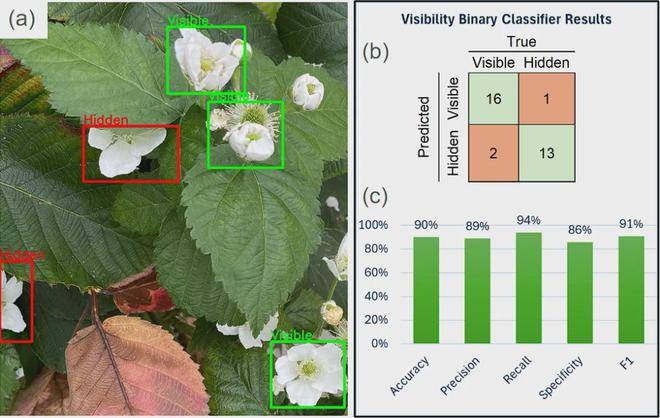
为了实现这一目标,研究人员利用深度相机和定制训练的YOLOv8模型来识别和定位花朵。该模型从彩色图像中提取边界框来定位每朵花的2D位置,并利用深度图像来估计它们在识别机械臂的基架中的3D坐标。此外,研究团队还使用了一个自定义二元分类器来确定花的中心是否可见,从而评估授粉的可行性。
为了增强协调性和效率,研究团队采用了一种特殊策略来规划授粉顺序,优先考虑最近的未授粉花朵。视觉伺服技术则通过跟踪和补偿花朵的运动来进一步辅助这一过程。
仲裁代理的任务是在冲突出现时识别并提供简单的解决方案,从而保持高授粉性能并最小化计算费用。它监控所有智能体的性能和状态数据,例如授粉率,以寻找性能下降的迹象,并分析智能体的状态以确定冲突的类型。
当发生机械手之间的冲突或机械手异常时,裁判员会介入并提供解决方案。例如,在两个或多个机械手争夺相同或相邻的花朵时,裁判员会随机选择一个操纵器继续授粉,同时引导其他操纵器回到原来的位置以避免冲突。这种方法不仅解决了当前的冲突,还有助于在空间上重新分配智能体并减少未来冲突的可能性。
授粉机器人人Stickbug制作完成后,研究团队对其性能进行了严格的测试。由于时值非花期,自然花朵稀少,因此团队选用了人造荆棘植物作为授粉对象。
此外,鉴于人造植物无法通过果实生长来验证授粉是否成功,因此研究团队设定了特定的评估标准:将“机械手识别到一朵花,向它移动,并执行授粉动作”定义为一次“授粉尝试”,将“授粉尝试期间,末端执行器的尖端与花朵发生了接触”定义为成功授粉。
为全面评估Stickbug的性能,研究团队对其配置了1、2、4及6个机械臂的不同模式进行了详尽的测试,意在超越对单一机械臂设置的评估范畴。每种配置均经过五次重复实验,累计进行了二十轮测试。
实验结果显示,装配了6个机械臂的Stickbug每分钟能尝试1.5次以上的授粉,但成功率却仅限于50%。团队深入剖析后发现,问题的症结在于机械手的移动会导致花朵移出末端执行器相机的拍摄范围,特别是在相机贴近花朵、位移容错范围较小时尤为明显。进一步的数据分析(如图7.a所示)还显示,随着机械手数量的增加,相互间的干扰也随之增强,导致授粉成功率相应下滑。
为了攻克这一难题,研究团队未来将致力于提升花朵跟踪技术,并优化机械手的协同作业、最小化彼此间的干扰,以提升整体的授粉成功率。

同时,实验数据还表明,机械手数量的增多会提升授粉尝试的频率和总数。这意味着,尽管每个机械臂都是独立工作,但通过空间协调依然能够发挥出效率。这种授粉性能的提升,印证了空间分布操纵器的设计理念,即通过固有的任务分配机制来最小化工作重叠。值得一提的。
Im电竞端口
